Open Access
Review Article
Max Screen
ISSN: 2455-765X
Copyright: © 2018 Gavrilović B. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Related article at Pubmed, Google Scholar
This paper studies the theoretic and practical solutions of appearance of reactive power and compensation of it in the 25 kV, 50 Hz supply system of the Serbian Railway. The article proposes the theoretic (by using formulas, equivalent, structural schemes, phasor diagrams) and practical research (by providing the schemes of connecting capacitor banks, calculating the parameters of capacitor banks) for the compensation of reactive power. The main purpose of this article is to introduce and illustrate a purpose of the new method and a novel control algorithm of the Flexible AC Transmission Systems (FACTS) descriptived in literature [1]. When the FACTS is installed at the traction substation, the performance to compensate the harmonic currents is vastly superior. Also, the reactive power demand can be completely compensated so that the input power factor is nearly unity. However, the voltage drop and the voltage sag cannot be fully compensated. Examples obtained from relevant applications describing the use of reactive power compensators implemented with static VAR compensator and static synchronous compensator are also described.
Keywords: Static VAR compensator (SVC); Static Synchronous Compensator (STATCOM)
The single-phase electric supply of electrified railway is provided via single-phase or three-phase traction sub-stations. The electric locomotives are basically considered single-phase loads in which the load conditions and speeds alter during every short span of time. Besides, non-linearity, asymmetrical, and nonsinusoidal are other characteristics of such single phase loads.
In analyzing the power factor behavior, leading states are considered. However such cases occur seldom in the Electrical Railway systems.
Harmonic and negative sequence components of volt-age and current viewed from the point of common coupling have been evaluated in several papers [2]. However, the power factor has not been analyzed focused sufficiently in the Electrical Railway systems as a power quality index.
In order to determine the power factor behavior at the point of common coupling, four definitions are presented by IEEE Standard 1459-2000 [2]. The aforementioned assumptions are not able to express the exact nature of the Electrical Railway Systems. Therefore, this paper is aimed at evaluating the power factor behaviors of the utility grid in various terms of unbalance positions and harmonic distortion, using the real load model [2].
The aforementioned assumptions are not able to express the exact nature of the Electrical Railway Systems. Therefore, this paper is aimed at evaluating the power factor behaviors of the utility grid in various terms of unbalance positions and harmonic distortion, using the real load model [2].
One of the significant indexes in defining the power quality of the utility grid is the load power factor and the feeding system. Power factor is generally determined by a specific definition considering balance loading without harmonics on the load side of substation. However, in practice the power factor is affected by harmonic distortion and also unbalance loading.
Several power factor definitions are presented to apply the effects of non-sinusoidal and unbalanced conditions in electrical railways. In this part, calculating methods for the power factor is presented [3].
The active power is composed of the fundamental and harmonic components. These components are defined as bellow respectively:
The reactive power is composed of the fundamental and harmonic components too. These components are defined as bellow respectively:
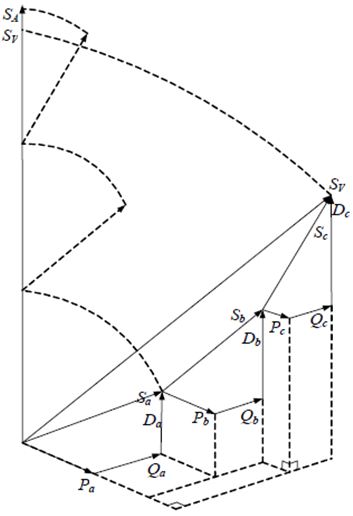
Obviously, SA is the direct sum of three single-phase apparent powers, so that it cannot completely demonstrate the effects of load unbalance.
If the active, reactive and distortion powers are considered individually from each other, vector apparent power (SV) and apparent power factor (PFV) are defined as:

Figure 1 shows the difference between SA and SV.
The effective apparent power (Se) and effective power factor (PFe) of the three-phase is calculated through the following equations:
The effective apparent power (Se) and effective power factor (PFe) of the three-phase is calculated through the following equations:
The effective apparent power has been introduced to determine the power-line losses caused by unbalanced loads [4].
In order to evaluate the loading characteristic of the Electrical Railway, it is necessary to introduce a suitable power factor definition among PFe, PFA and PFV. Finally, fundamental power factor is defined as:
This definition is based on only fundamental component and therefore, harmonic distortion cannot effect on its value.
Contrary to the situation in the industrial energy sector, the load in the railway power sector and especially in railway power traction lines may change significantly (Figure 2). Therefore, it is essential to ensure reliable, stable electric power supply for electric traction vehicles (electric trains, electric locomotives). Electric traction vehicles (ETV) consume a significant share of reactive power from the 25 kV, 50 Hz catenary hence the power factor cos φ in the point of traction substation bus is relatively low (0.75-0.85) [6]. The value of average power factor cos φ is 0.8 [7]. A low power factor has a negative influence. Reactive power is needed for electric traction vehicles (ETV) which consume it from the energy system and load the power transmission lines, transformers, increase the active power and losses. In a single supply system of alternating current electric traction, the active power is expressed as: P = UI cos φ. The losses of active power ΔP, with active circuit resistance are calculated as follows: ΔP = I2 R. By expressing the current as I = P/U cos φ, the losses of active power ΔP are calculated as follows:

From the formula (26), we can see that the smaller cos φ, the greater are the losses of active power. In addition to this, with low cos φ, with reactive current Iр in the power supply circuit, the resistance of which is of reactive type, additional voltage losses are produced ΔU (with the same value of the constituent Ia active current) [8].
The scheme of a single supply catenary of 25 kV, 50 Hz and phasor currents, voltages diagram is provided in Figure 2. In a phasor diagram of voltages it is considered that AN ≡ AM. In this case, the projection of the vector of decrease of voltage ΔU is decrease of voltage ΔU.
When less electric vehicles are operating, the traction power transformer will operate at a reduced load, or even empty. For this it is desirable to have reactive power compensation equipment required by the transformer.
The most popular method of improving power factor at a low voltage distribution system is the use of power capacitors. Capacitor's size and location has to be determined and corrected by calculations. In general these have to be connected as close as possible to the load.
Shunt compensation–here the device (capacitor bank) is connected in parallel with the 25 kV, 50 Hz catenary line. Shunt compensation of reactive power can be employed either at the load level, substation level or at transmission level. Compensation should be provided as close as possible to the consumption point to avoid having to distribute this power in the other part of network.
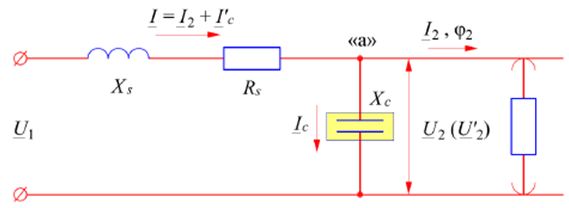
A shunt compensator is always connected in the middle of the transmission line along with either a current source, voltage source or a capacitor. It supplies reactive power to the system. An equivalent scheme of compensation of reactive power equivalent circuit, where the capacitor bank (PCB device) connected in parallel to the load (electric locomotives) is located in the traction substation as provided in Figure 3.
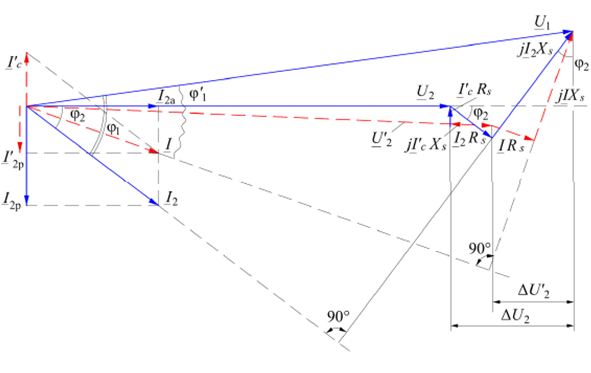
A capacitor bank (PCB device) connected in parallel is located in point «a». The phasor diagrams where the shunt of reactive power compensation equipment PCB is connected and disconnected is provided in Figure 4. In the, to improve the visibility, a different scale is used, a phasor diagram, where the shunt capacitor bank PCB is disconnected showing solid lines. At the beginning, the phasor diagram voltage vector is taken, the location of the current vector is established according to the active-inductive load character (the angle is φ1=36.9 °) (Figure 4). Subsequently, the components of active and reactive currents are drawn, the vectors of the decrease of voltage and is illustrated, the location of the vector of the voltage source is established. Angle φ1 defines the factor of the supply system capacity. The losses of voltage to level «a» are marked as ΔU2. For the compensation of reactive power in point «a», capacitor C is connected. The vector diagram is depicted in dotted lines. Upon connection of a reactive power compensation device in point «a», on the circuit of the capacitor current is flowing, the vector outstrips by 90 ° vector of load voltage (Figure4). In this case, current is flowing on the circuit up to point «a» (Figure 4). Vector of the reactive component current becomes smaller in the system than reactive component current vector until the connection of the compensation device, whereas the vector of the active component current remains unchanged (Figure 4). We continue with the vector diagram from the end of the vector of the voltage source due to the fact that the value of its module and the position do not depend on the fact if the compensation equipment is connected to the circuit or not. From the end of this vector, a vector of voltage decrease is drawn, and subsequently a voltage decrease vector by taking into consideration the fact the vector of current is smaller than the vector of current. As a result of this, the module of voltage decrease of vector is smaller than the module of voltage decrease vector, and the module of voltage decrease vector, is lower than the module of voltage decrease vector. Upon connection of the starting point of the vector diagram with the start of the voltage decrease vector, vector module of voltage in point «a» after connecting the compensation equipment is determined. The module of voltage of the vector is greater than that of vector voltage in point «a» (until the connection of the compensation equipment). This difference was a result of the decrease of voltage value of vector. The angle of the phase between voltage and current is φ' (Figure 4). The voltage losses up to point «a»in the phasor diagram is marked as ΔU'2. Upon completion of a vectoral analysis, it was established that angle φ'<φ, that is the power factor in the supply system increases (cos'φ1>cosφ1), and ΔU'2<ΔU2, means that the voltage in the connection point of capacitor device PCB «a»increases (Figure 4).
The voltage losses to point «a» ΔU'2 are calculated as follows:

The voltage losses up to point «a» in the phasor diagram is marked as ΔU'2. Upon completion of a vectoral analysis, it was established that angle φ'< φ, that is the power factor in the supply system increases (cos'φ1>cos φ1), and ΔU'2<ΔU2, means that the voltage in the connection point of capacitor device PCB «a» increases (Figure 4).
Having evaluated the components of active I2a and reactive I2p load current ΔU=IeaR+IepX , the losses of voltage U'2 shall be calculated as follows:

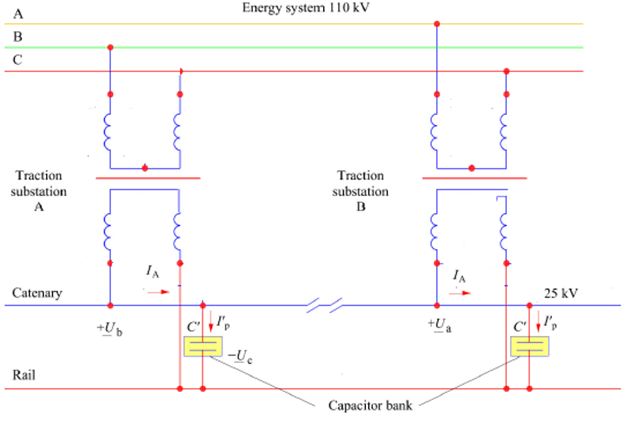
The authors of this paper proposed to locate the shunt reactive power compensation device (capacitor bank PCB) on the side of A and B traction substations of 27.5 kV voltages in two points and in a sectioning position (Figure 5) [1].
By locating the reactive power compensation device capacitor bank PCB) in the arm of the traction substation 25 kV (left) and 25 kV (right), they are connected to parallel load of electric locomotives. The capacitor of the reactive power compensation device (capacitor bank PCB) is conditionally depicted as a capacitor C connected between the catenary wire and the rails. The schemes of the 25 kV, 50 Hz catenary of 110/27.5/10 kV traction substations by using a shunt reactive power compensation device (capacitor bank PCB) connecting method is provided in Figure 5.
Reactive power compensation device (capacitor banks PCB) connected in parallel reduce the losses of voltage in both arms of the catenary 25 kV (left) and 25 kV (right). PCB connected in the catenary sectioning post. In this case, the capacitor banks of reactive power compensation PCB empower the reduction of the losses of voltage in the traction network and to increase the voltage in the sectioning post [9]. To remove the resonance of voltage consistently, a reactor is connected with capacitors C. With the voltage of 50 Hz of the catenary (according to the calculations completed by the author), to remove the voltage resonance, the inductive resistance of the reactor has to be 1/9 of the capacitor resistance: X1=1/9XC . The simplified and automatic control of PCB capacitor parameters schemes, a phasor diagram of the reactive power compensation is provided, where the capacitor bank and the reactor are connected Consistently have been provided in Figure 6 [10,11].
In the middle part of the schemes, a phasor diagram of the reactive power compensation is provided, where the capacitor bank and the reactor are connected consistently (Figure 6).
In the case of capacity of parallel (shunt) connected capacitor banks PCB, the reactive power is transferred to the traction network. The total capacity of the reactive power necessary for compensation of the PCB capacitors C depends on the number of series consistently connected capacitors in arm M and the number of parallel groups N and the inductivity of the reactor L. The capacity of the parallel capacity compensation banks PCB needed Qn" is calculated as a difference between the reactive power consumed from the system without the compensation equipment and with them (Figure 6).

here: А – active electric energy consumed for traction of the substation; φ1–the angle of the phase between the traction substation supply arm current and voltage; φ2–the angle of the phase between the current of the traction substation supply arm current and voltage (with a capacitor device switched on).
Having in mind that the voltage in the arm with the capacitors U'с and reactor ULр is in the opposite phase, it can be written that voltage in the arm of the traction transformer is U2=(U'с − ULр). Considerig that ULр = 1/9 U'с, hence:

From here: U'с =1.125 U2. In this way, by connecting the reactor with voltage in them consistenly, the capacity increases by 12.5%. This means that the number of capacitors must be increased by 12.5%, the reactive power of the compensation device used Qn' will be 1.125 Qn". To increase the reliability, the reactive power of the compensation device Qn" has to be increased not by 12.5%, but by 20% [12]. The reactive power of the compensation device capacitors shall be calculated as follows:

here: Uс – the voltage of the capacitor; Xс–the capacitive reactance. The number of capacitors M connected consistently in one arm shall be calculated according to the maximum value of voltage U'с and the allowed voltage of one capacitor. Considering that the maximum voltage of the catenary U2 is equal to 29 kV, the value of voltage U'с will be 33 kV. To calculate the total number of the compensating capacitor K, one needs to know the factual reactance Qc fact., of one capacitor, which is calculated as follows:
here: Uc.fact.–factual voltage of a single capacitor terminals. The factual voltage of the PCB capacitors Uc fact. may be calculated as follows:

For establishing the inductive reactance ХLp, the capacity resistance Хс of the compensation device needs to be calculated as:
According to the inductive resistance of the reactor ХLp,, which amounts to 1/9 of Хс, the inductivity of the reactor Lр is established, where the total reactance of the compensation device is Хусm=(Хс−ХLp). Knowing these parameters, one may calculate QFact, the factual tgφ2 and соs φ2. The number of capacitors connected consistently М and the number of parallel groups N are established on the basis of the technical characteristics of the capacitors used. М, as a rule, it is from 6 to 32, whereas N – from 2 to 4. In the system, a reactor may be used (of ФРОМ type), the inductivity of which is from 75 to 107 mH, with separate terminals at 8 mH interval [13]. For the catenary sections of 25 kV (НИИЭФА- ЭНЕРГО Russia institution), equipment for reactance compensation and 27.5 kV voltage filtration has been installed, the reactive power of which is 2800 kVAr.
The most important technologies covered include: detuned reactive power compensation (capacitive), thyristor switched reactive power compensation (capacitive and inductive), and passive filter circuits (capacitive), active electronic filters (capacitive and inductive as 4 or 3 conductor versions).
In practical systems, manual and automatic control systems of reactive power Q are applied in capacity device parameters. The schemes of compensation of reactive power equipment connection and control are provided in Figure 7. It is crucial to measure the value consumed in the dynamic mode from the feeder and to only connect to the circuit for compensation the necessary number of capacitors (respectively Qc). It is crucial to measure the value consumed in the dynamic mode from the feeder and to only connect to the circuit for compensation the necessary number of capacitors (respectively Qc). It is not allowed to supply to the feeder the reactive power of capacitors greater than instantaneous consumed from the feeder. For the control of the compensation equipment parameter (C value of the capacity bank) it is proposed to connect an electronic device made of thyristors connected in series and inverse-parallel thyristor valves [12]. By sending respective opening signals to the thyristor gates, the value of the reactive power consumed (in the straightforward direction) and the value of the compensatory reactive power (in the inverse direction) may be controlled.
Flexible AC Transmission Systems (FACTS), uses power electronic devices are widely used for mitigation of harmonics and sag which will in turn improve quality of power and enhancing the traction system reliability. Railway is one of the major load on the grid. There it is necessary to control the harmonics and voltage fluctuation FACTS-devices provide a better control on reactive power, power factor and improve the reliability of existing installations. As the length of line increases line losses also increases and need for FACTS also gets important. The FACTS-devices can be switched or controlled shunt compensation, series compensation. These devices are fast current, voltage or impedance controllers.
In order to improve the power quality, without tremendously increasing the initial cost, FACTS devices can be installed in the conventional system. With these devices it is possible to use lower grid voltage for the railway than without them, since the unbalances will be reduced. Two common shuntconnected devices used for dynamical balancing is the Static VAR Compensators (SVC) or the Static Synchronous Compensator (STATCOM). Both technologies have been installed in several systems and have improved the power quality in the grid. In a railway grid, they can offer dynamic voltage control, mitigate harmonics and balance the load between phases. This technology has been installed for this purpose in Japan, England and France [13].
Static VAR Compensator (SVC) is shunt connected FACTS devices which gives fast control of reactive power either by absorbing or injecting of reactive power to maintain voltage level. SVC consists of Thyristor Controlled Reactor (TCR), Thyristor Switch Capacitor (TSC) and mechanically switch capacitor (MSC) or inductor harmonic filter. Equivalent reactance is varied in stepwise manner. It aims at compensating steady state reactive power.
Advantages SVC in traction system: • SVC has the capability of not only compensating the negative phase sequence but also reactive power (The negative phase sequence have a negative impact on the grid and apparatuses that operate in the grid. It will decrease the transmission capability, lower the output power from the transformer, and disturb rotating machines like motors and generators [14].
• To improve voltage profile when one of two feeder station trips and two sections has to be fed from single station this not only degrades the traction efficiency and performance.
• To maintain power factor close to unity.
A STATCOM is a shunt device similar to SVC but it consists of a voltage source converter (VSC) and a coupling transformer, connected in shunt with the AC system. STATCOM is used to improve the system stability by reducing losses and reactive power compensation [26].
Compared with SVC, STATCOM has advantages such as fast speed, gat loading rate high work efficiency, and small output harmonic content. STATCOM is frequently used for mitigation of voltage flicker. STATCOM reduces the voltage flicker to the factor, negative phase sequence compensation, improves power factor.
SVC and STATCOM provide dynamic voltage support for high power traction system and prevents it from harmful voltage sag. But STATCOM is more superior then SVC. FACTS devices provide voltage control and harmonic reduction of AC supply systems which is due to a converter fed traction.
Prior to the invention of the static reactive power compensators, power factor compensation was to preserve large rotating machines such as synchronous condensers or switched capacitor banks [15]. The thyristor-controlled reactor (TCR) and thyristor-controlled capacitor (TSC) are a set of electrical devices for providing fast-operating reactive power on high-voltage electricity transmission networks [16]. Using of phase control thyristors, the thyristor controlled reactor TCR may be variably switched into the circuit and so provide a continuously variable MVAr injection (or absorption) to the electrical network (Figure 6 and 7) [17]. In this electrical scheme configuration, coarse voltage control is provided by the capacitors; the thyristor-controlled reactor (TCR) and thyristor-controlled capacitor (TSC) are to provide smooth control [17]. Reactive power compensators should regulate the voltage, power factor, and harmonics and stabilize the system [18,19]. By using alternating current 25 kV, 50 Hz catenary 110/27.5 kV in traction substations the reactive power compensation equipment, on the side of PCB high voltage 110 kV the power factor is increased to 0.91-0.93 [20,21].
Research results are provided when the author proposed to locate the shunt reactive power compensation device (capacitor bank PCB) on the side of traction substations of 27.5 kV voltage and offered automatic control of PCB capacitor parameters schemes (Figure 5 and 6) [22].
The calculated 25 kV, 50 Hz alternating current catenary feeder system parameters before compensation and after compensation are provided in Table 1.
Table 1: Definitions: P–active traction substation power; S1–apparent power, when the power factor cosφ1=0.85; Q1 – reactive power from network, when the power factor cos φ1=0.85; S2–apparent power, when the power factor cosφ2=0.97; ΔQc–reactive power compensation (supplied by capacitors).
The diagram illustrating the compensation of the reactive power and capacitor bank schemes are provided in Figure 8. The diagram illustrates 25 kV, 50 Hz the parameters of alternating current in the catenary feeder before compensation and after compensation that were produced after the implementation of the authors solutions, that is after installing in the 110/27.5 traction substation 2,716 MVAr reactive power capacitor banks PCB. For the creation of 2,716 MVAr reactive power capacitor bank with 28 branches of 97 kVAr and 552 μF, fuseless units of company ABB (12-25 kV) may be used.
The new method and a novel control algorithm of the Flexible AC Transmission Systems (FACTS) proposed by the authors of this paper descriptived in literature, the reactive power demand can be completely compensated so that the input power factor is nearly unity [1]. However, the voltage drop and the voltage sag can be significantly compensated [23-25].
1. From the calculations it was established that to increase the power factor cos φ from 0.85 to 0.97 of 25 kV, 50 Hz contact network feeder system power cos φ in the traction substation, 2.716 MVAR reactive power capacitors have to be equipped.
2. To increase 25 kV, 50 Hz contact network feeder capacity factor cos φ, synchronous capacitors or capacitor banks may be used.
3. A 25 kV, 50 Hz contact network supply system is asymmetric, that is the load of the phases is not equal, hence it is difficult to use synchronous capacitors in a contact network of 25 kV, 50 Hz for the compensation of reactive power.
4. Upon installation in a 110/27.5 kV traction substation 2.716 MVAr reactive power capacitor banks, cosφ1=0.85 increased to cosφ2= 0.97.
5. Static reactive power compensators are more expensive than mechanically switched capacitors.
6.Static reactive power compensators are used to provide support for fast changes and the mechanically switched capacitors to provide steady-state VARs.
7. Optimally designed compensation systems that take into account the requirements of the equipment and systems to be compensated: reduce energy costs by complying with the contractually agreed power factor, enable the planned connection of consumers with a high level of load fluctuation, reduce losses in equipment in customer systems such as transformers and cables as well as in the transmission and distribution network of the network operator, stabilize public and industrial networks by reducing total harmonic distortion.
8.The new method and a novel control algorithm of the Flexible AC Transmission Systems (FACTS) proposed by the authors of this paper descriptived in literature, the reactive power demand can be completely compensated so that the input power factor is nearly unity [1].
This work was supported by the Serbian Railways and the school of railway applied studies in Belgrade. The authors would like to thank for this support.

![]()

 |
| Figure 1: Arithmetic (SA) and Vector (SV) apparent powers, unbalanced non-sinusoidal conditions |
 |
| Figure 2: The scheme of the section of 25 kV, 50 Hz catenary single supply (left) and phasor currents, voltages diagram |
 |
| Figure 3: Equivalent power compensation of equivalent circuit, where a capacitor bank (PCB device) parallel connected of electric locomotive and is located in the traction substation:-voltage of power supply;-current in the ETV supply system; (U1 )-voltage in installation point of PCB;-current of loading circuit;-PCB capacitor current; Rs, ?s-active and inductive circuit voltage up to the point of connecting PCB; ??- (PCB device) capacity resistance; f2 -the angle between the voltage and current phases at the point of PCB device installation |
 |
| Figure 4: Phasor diagrams where the shunt reactive power compensation device PCB is connected (dotted lines) and disconnected (solid lines) |
 |
| Figure 5: 110/27.5/10 kV traction substation schemes with connected shunt reactive power compensation device - capacitor banks PCB |
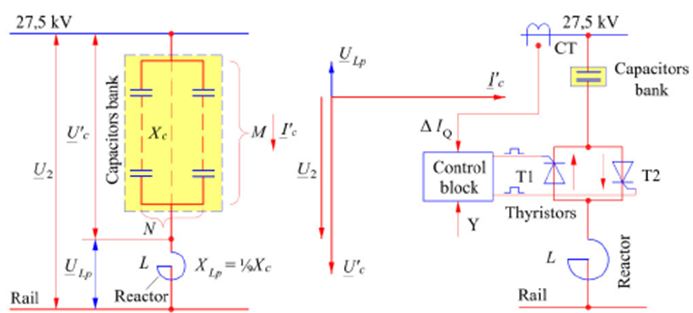 |
| Figure 6: The simplified and automatic control of PCB capacitor parameters schemes, a phasor diagram of the reactive power compensation: CT-current transformer; ?IQ-reactive component current deviations signal; T1-T2-thyristors; Y-control signal |
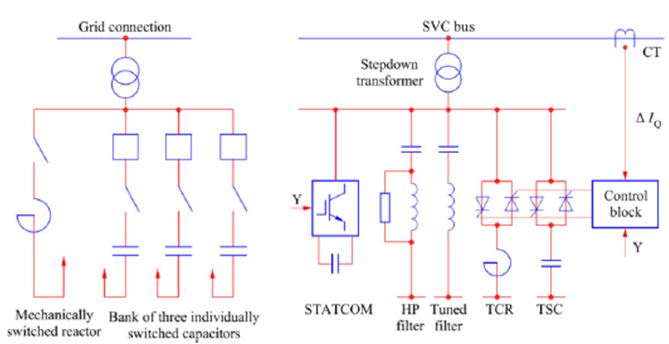 |
| Figure 7: Examples of FACTS for shunt compensation (schematic): CT - current transformer; Y - automatic control signal; ?IQ - reactive current deviation signal |
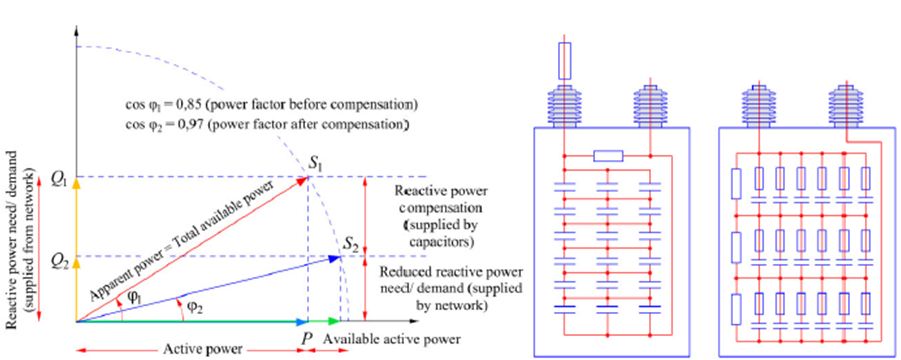 |
| Figure 8: A diagram illustrating compensation of reactive power (a) and the schemes of capacitor bank (b) |
Before compensation |
After compensation |
||
cos φ1 = 0.85 |
|
cos φ2 = 0.97 |
|
P = 7.35 MW |
|
|
|
S = p = 7.35 = 8, 647MVA |
φ1 = 31.76° |
S = p = 7.35 = 7.577MVA |
φ2 = 14.07° |
Q1 = P.tg φ1 = 7.35.0.62=4.553 MVAr |
|
Q2 = P.tg φ2 = 7.35.0.25=1.837 MVAr |
|
Capacitor bank reactive power: ΔQc= S1−S2=4.553−1.837=2,716 MVAr |
|||