Open Access
Research Article
Max Screen
ISSN: 2455-765X
Copyright: © 2018 Levent H. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Related article at Pubmed, Google Scholar
In this paper, we introduce the notion of a complex interval which is significant for interval-valued data and interval-based signal processing. First, we present the space of complex intervals and investigate the quasilinear structure of the space of complex intervals. We observe that this space is Hilbert quasilinear space with a set-valued inner product
Keywords: Quasilinear Spaces; Inner Product Quasilinear Spaces; Complex Intervals; Signal Processing; EEG Signals
Some methods associated with the biostatistic and biometric applications lie in the estimation of accuracy measures for population parameters, change of cancer cells, genetic mutations or EEG signal processing. A few of such applications are bootstrap method, carcinogenesis models and candidate gene analysis. The intervals constitute a mathematical background to eliminate such accuracy datas
In recent years, there has been increasing interest in interval mathematics and interval-valued functions and their applications. Replacing a precise value by an interval value generally reflects the variability or uncertainty circumstances in observation process. In signal processing, in general, it is very difficult to deal with a process with reliable information about the properties of the expected variations. Such uncertainties in process lead us to set up mathematical foundation of interval-valued data and intervalbased signal processing [1-3]. Because of these reasons we want to study the quasilinear structure of the space of complex intervals for research of interval-valued functions (signals).
We mean a function f from R into the special set IC by an interval-valued signals. Now let us introduce special properties of IC. Each element x of IC is called a complex interval, that is,
where  are nonempty closed (real) intervals of R and i=√(-1), the complex unit. The intervals
are nonempty closed (real) intervals of R and i=√(-1), the complex unit. The intervals  are called real and imaginary part of x, respectively. For example, x=[-2,1]+i[3,7] is a complex interval where
and
are called real and imaginary part of x, respectively. For example, x=[-2,1]+i[3,7] is a complex interval where
and  and
and  . Of course, each real interval is a complex interval.x r(s) may equal to x r(s) and in this case
. Of course, each real interval is a complex interval.x r(s) may equal to x r(s) and in this case
 is written as
is written as  and is called a degenerate complex interval. More clearly, for any x,y ∈ R, [x,x]+i[y,y] is a complex
degenerate interval and is written as {x} + i{y}. In this respect, R is a subset of IR, the set of all nonempty closed (real) intervals and
the complex number C is a subset of IC. Further, IR is a subset of IC
and is called a degenerate complex interval. More clearly, for any x,y ∈ R, [x,x]+i[y,y] is a complex
degenerate interval and is written as {x} + i{y}. In this respect, R is a subset of IR, the set of all nonempty closed (real) intervals and
the complex number C is a subset of IC. Further, IR is a subset of IC
To get a comprehensive and healthy interval-valued signal processing we need a mathematical point of view. This is due to the fact that the sets IR and IC are not vector spaces. However, they are in accord with a similar (in fact more general) structure, namely a quasilinear space.
We will start this section by giving the definition of quasilinear spaces and some basic notions which will be used later on. Note that quasilinear spaces has been only introduced on the reel field R so far. As distinct from Aseev’s definition [4] and from our some previous studies, we will consider the quasilinear spaces over a general field K. The elements of K are called scalars, practically, they will be real or complex numbers. We think that this approach may be formed more useful and suitable backdrop for some applications, especially, for interval-valued data analysis and signal processing.
A set X is called a quasilinear space, (briefly QLS) on field K, if a partial order relation "≤", an algebraic sum operation, and an operation of multiplication by real or complex numbers are defined in it in such a way that the following conditions hold for any elements x,y,z,v ∈ X and any α,β ∈ K [4]:




K is called the scalar field of the quasilinear space X, and X is called a real quasilinear space if K = R and is called a complex quasilinear space if K = C. Mostly K will be C in this work.
Any real linear space is a QLS with the partial order relation defined by “x ≤ y if and only if x = y”. In this case, QLS axioms is the linear space axioms.
Perhaps the most popular example of nonlinear real QLSs is IR with the inclusion relation “⊆”, with algebraic sum operation

and with real-scalar multiplication

Proof of this assertion will be given by more general form. Another name of IR is ΩC(R), the set of all nonempty compact convex subsets of real numbers. A compact convex subset of Rn is called a convex body and the space of this subsets is denoted by ΩC (Rn),n = 1,2,.... Further, Ω(Rn) is the set of all nonempty compact subsets of real numbers and is another important example of nonlinear real QLSs. In general, Ω(E) and ΩC(E) stand for families of all nonempty closed bounded and nonempty convex closed bounded subsets of any normed linear space E, respectively. Both are real or complex QLSs with the inclusion relation, with multiplication by a real or complex number λ which is defined by
and with a slight modification of addition as follows:

where the closure is taken on the norm topology of E.
We should mention  the space of all n-fold real interval vectors [5] where n is a positive integers. For example a typical element
of
the space of all n-fold real interval vectors [5] where n is a positive integers. For example a typical element
of  can be given as ([-1,2],[3,6]).
can be given as ([-1,2],[3,6]).  Further, is the space of all n-fold complex interval vectors ([1,3]-2i[1,2],[-1,0]+i[1,5]) is a
typical element of
Further, is the space of all n-fold complex interval vectors ([1,3]-2i[1,2],[-1,0]+i[1,5]) is a
typical element of 
Remark 2.1For n=2,3,..., is different from ΩC(Rn). For example, the unit ball
is different from ΩC(Rn). For example, the unit ball

of R2 is an element of ΩC(R2). But B is not an element of  Further, they both are nonlinear quasilinear spaces by different
operations and relations.
Further, they both are nonlinear quasilinear spaces by different
operations and relations.
In this work we mainly interested in algebraic and metric structure of n-fold real or, in general, complex interval vectors and the interval functions. Although, they are not a vector space we will choice the term interval-vector due to its conventional usage.
Now, let us record some basic necessary results from [4]. In a QLS X, the element θ is minimal, i.e., x = θ if x ≤ θ. An element x' is called inverse of x ∈ X if x + x '= θ. The inverse is unique whenever it exists. An element x possessing inverse is called regular, otherwise is called singular.
Lemma 2.1[4] Suppose that each element x in QLS X has inverse element x' ∈ X. Then the partial order in X is determined by equality, the distributivity conditions hold, and consequently X is a linear space.
Hence in a real linear space, the equality is the only way to define a partial order such that conditions (1)-(13) hold.
It will be assumed in what follows that -x = (-1) . x. Also, note that -x may not be x'. Any element x in a QLS is regular if and only if x - x = θ if and only if x' = -x.
Definition 2.1Suppose that X is a QLS and Y ⊆ X. Then Y is called a subspace of X whenever Y is a QLS with the same partial order on X.
Theorem 2.1 Y is subspace of QLS X if and only if for every x, y ∈ Y and α, β ∈ K, α.x + β.y ∈ Y
Proof of this theorem is quite similar to its classical linear algebraic analogue. So we see easily that IR is a subspace of IC. Further, IC is a subspace of Ω(C).
Let X be a QLS and Y be a subspace of X. Suppose that each element x in Y has inverse element x' ∈ Y then by Lemma 2.1 the partial order on Y is determined by the equality. In this case Y is a linear subspace of X. An element x in QLS X is said to be symmetric if-x = x and Xsym denotes the set of all symmetric elements. Also, Xr stands for the set of all regular elements of X while Xs stands for the sets of all singular elements and zero in X. Further, it can be easily shown that Xr , Xsym and Xs are subspaces of X. They are called regular, symmetric and singular subspaces of X, respectively. Furthermore, it isn’t hard to prove that summation of a regular element with a singular element is a singular element and the regular subspace of X is a linear space while the singular one is nonlinear at all.
Let X be a real or complex QLS. The real-valued function on X is called a norm, if the following conditions hold [4-9]:
here x,y,xεare arbitrary element in X and α is any scalar.
A quasilinear space X with a norm defined on it, is called normed quasilinear space (briefly, normed QLS). It follows from Lemma 2 that if any x ∈ X has inverse element x' ∈ X, then the concept of normed QLS coincides with the concept of real normed linear space. Notice again that x' may not be exist but if x' exists then x' = -x. Hausdorff metric or norm metric on X is defined by the equality

Since x≤y+(x-y) and y≤x+(y-x), the quantity h(x,y) is well-defined for any elements x,y ∈ X, and it is not hard to see that the function h satisfies all the metric axioms. Also we should note that h(x,y) may not equal to ||x − y|| if X is not a linear space; however h(x,y) ≤|| x y|| − for every x, y ∈ X.
Lemma 2.2[4] The operations of algebraic sum and multiplication by real or complex numbers are continuous with respect to the Hausdorff metric. The norm is continuous function respect to the Hausdorff metric.
Proposition 2.1The following conditions hold with respect to the Hausdorff metric:
for each α ∈ K and every x,y,z,v ∈ X
(a) Suppose that xn → x0 and yn → y0, and that xn ≤ yn for any positive integer n. Then x0 ≤ y0.
(b) Suppose that xn → x0 and zn → x0. If xn ≤ yn ≤ zn for any positive integer n, then yn → x0.
(c) If xn + yn → x0 and yn → θ then xn → x0.
Example 2.1[4] For a normed linear space E, a norm on Ω(E) is defined by  Hence ΩC(E) and Ω(E) are normed QLSs.
In this case the Hausdorff (norm) metric is defined as usual:
Hence ΩC(E) and Ω(E) are normed QLSs.
In this case the Hausdorff (norm) metric is defined as usual:

where Sr(θ) is closed ball of E and x,y are elements of ΩC(E) or Ω(E). Further, ΩC(E) is a closed subspace of Ω(E). Further, Ω(E) and
ΩC(E) are Banach space. For E=R, ΩC(R)=IR is a Banach space with the norm defined by 
Now, let us give a useful type of QLSs called consolidate QLS.
Definition 2.2[10] Let X be a QLS, M ⊆ X and x ∈ M. The set
is called floor in M of x . In the case of M = X it is called only floor of x and written briefly Fxinstead of Fx X.
Floor of an element x in linear spaces is {x}. Therefore, it is nothing to discuss the notion of floor of an element in a linear space.
Definition 2.3[10] Let X be a qls and M ⊆ X. Then the union set

is called floor of M and is denoted by FM. In the case of M = X, FX is called floor of the qls X. On the other hand, the set
is called floor in X of M and is denoted by  .
.
We refer to the reader to [10] for detailed informations about this topic
Definition 2.4[11] A quasilinear space X is called consolidate QLS whenever supFyexists for every y ∈ X and

for element y=[-2,3]∈(ΩC(R))s∪{0}. Also, no there exists any element x such that x ⊆ z for z=[1,3] ∈ (ΩC(R))s∪{0}
Let us now give the definition of inner-product in a quasilinear space which is consistent with its linear analogue [7-9]. Later we will present some fundamental properties of inner-product and Hilbert QLSs. Previously let us introduce a definition.
Definition 2.5For two quasilinear spaces (X,≤) and (Y,≥), Y is called compatible contains X whenever X ⊆ Y and the partial order relation "≤" on X is the restriction of the partial order relation "≥" on Y. We briefly use the symbol X ⊆ Y in this case. We write X ≡ Y whenever X ⊆ Y and Y ⊆ X.
Remark 2.2Hence X ≡ Y means X and Y are the same sets with the same partial order relations which make them quasilinear spaces. However, we may write X = Y for X ≡ Y whenever the relations are clear from context.
Definition 2.6Let X be a QLS. Consolidation of X is the smallest consolidate QLS Xˆ which compatible contains X, that is, if there exists another consolidate QLS Y which compatible contains X then Xˆ ⊆Y.
Clearly, Xˆ =X for some consolidate QLS X. We do not know yet whether each QLS has a consolidation. This notion is unnecessary
in consolidate QLSs, hence is in linear spaces. Further,
For a QLS X, the set
is the floor of y in Xˆ .
Now, let us give an extended definition of inner-product given in [8]. We can say that the inner product in the following definition may be seen a set-valued inner product on quasilinear spaces.
Definition 2.7Let X be a quasilinear space having a consolidation Xˆ . A mapping ⟨,⟩:X×X→Ω(K) is called an inner product on X if for any x,y,z ∈ X and α∈K the following conditions are satisfied :





A quasilinear space with an inner product is called an inner product quasilinear space, briefly, IPQLS
Remark 2.3For some x ∈ Xr, ⟨x, x⟩ ≥ 0 means ⟨x, x⟩ is non-negative, that is, the order "≥ " in the definition is the usual order on ΩC(K)r ≡ K. It should not be confused with the order "≤" on X.
Example 2.3[7, 9] Let X be a linear Hilbert space. Then the space Ω(X) is a Hilbert quasilinear space by the inner-product defined by

Every IPQLS X is a normed QLS with the norm defined by
for every x ∈ X. This norm is called inner-product norm. Classical norm of IR [4] is generated by the above inner-product. Further xn →x and yn →y in a IPQLS then ⟨xn ,yn ⟩→⟨x,y⟩.
A IPQLS is called Hilbert QLS, if it is complete according to the inner-product (norm) metric. For example, IR is a Hilbert QLS.
Let us impose an order relation on IC:

for x,y ∈ IC. Then "≤" is a partial order relation on IC. Further, consider following operations:
on IC where i=√(-1) and λ ∈ C.
Theorem 3.1IC is a quasilinear space on the field C by the above relation and algebraic operations.
Proof. Verification of first five axioms to be a QLS is too straighforward. Further, the degenerate interval θ = [0,0] = {0}, is the identity element of the addition. Further, for 1,0 ∈ C and x ∈ I C, obviously, 1⋅x = x, 0⋅x = θ, and easily see that α⋅(βx) = (αβ)⋅x, and α⋅(x+y) = α⋅x + α⋅y. For α,β ∈ C and x ∈ I C, (α+β)x ≤ αx + βx,
Let us determine regular and singular subspace of IR and IC. If x = [a,a] = {a}, a ∈ R is a degenerate interval, then x is regular and there is no regular element other then such types. Hence




Regular subspaces of IR and IC just are, or can be identified with, R and C, respectively
We can impose a lot of norm on IC. For example,
is a norm on IC. Perhaps, the more useful norm on IC is

Last we should note the max-norm

is another important norm on IC.
Let us only verify the last two conditions to be norm for 
be arbitrary elements of IC. If x°y, then  This implies
This implies 


For the last conditions of the norm, let ε>0 be arbitrary and there exists an element 
such that x°y + xε and ‖xε‖2≤ ε . The conditions indicates 

Now let us assume x≰y with the above conditions. This means  Suppose
Suppose
 This gives a real number
This gives a real number

This is a contradiction. Thus  If the case
If the case  is valid then by the similar way we
get
is valid then by the similar way we
get  Consequently
Consequently  is a normed QLS.
is a normed QLS.

for any element  of IC. Hence IC is a consolidate QLS.
of IC. Hence IC is a consolidate QLS.
Now we shall present very important theorem for the space of complex intervals.
Theorem 3.2The space IC is inner product quasilinear space with Ω(C)-valued inner-product function defined by

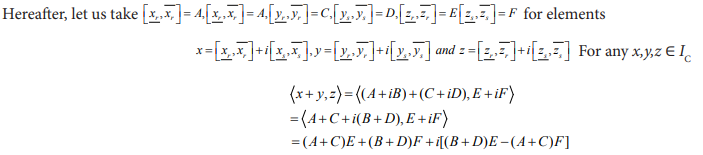
for elements  where the multiplication of real intervals is in its usual sense [5].
where the multiplication of real intervals is in its usual sense [5].
Proof.Since sum, difference and product operations of intervals is closed [5], we have that  and
and
 Thus, the equality (27) is well-defined, since x y, ∈
Thus, the equality (27) is well-defined, since x y, ∈  is a subspace of Ω(C). Let us show that this equality provides inner-product axioms
is a subspace of Ω(C). Let us show that this equality provides inner-product axioms
- For the regular elements x= + {a} i{b} and y{c}+i {d}, a,b,c,d  we write
we write
By the first condition of inner product on  and so ⟨x,y⟩∈ΩC (C)r≡C forany ⟨x,y⟩∈ΩC (C)r≡C.
and so ⟨x,y⟩∈ΩC (C)r≡C forany ⟨x,y⟩∈ΩC (C)r≡C.
Since A,B,C,D,E,F∈ΩC (R) and IR is a inner-product space,
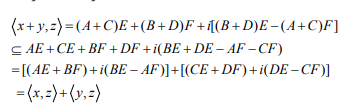
- For x,y ∈ IC and α∈C,


for any x∈IC.
- Since IC is a consolidate quasilinear space, (IC ) ̂=IC and so
- Suppose that x≤y and u≤v for
By the seventh axiom of inner-product on IR we say that AE ⊆ CG, BF ⊆ DH, BE ⊆ DG and AF ⊆ CH. Thus,
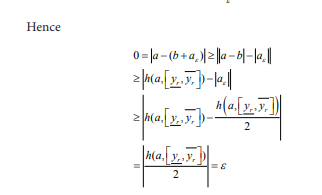
- We show that x≤y, if for any ε>0 there exists an element  such that
such that 
where Sε(θ) is closed ball of C: By the fact that ⟨xε,xε ⟩⊆Sε (θ) we have that

If it is considered that ‖A‖2≤ε and ‖B‖2≤ε, ‖xε ‖=‖A+iB‖≤‖A‖2+‖B‖2≤2ε. Thereby, we say that 𝑥≤𝑦 by the last condition of norm on 𝕀ℂ.
Remark 3.1It follows that if (IC )r ≡ C, i.e., x = {a} + i{b} for a,b ∈ R then the inner product (27) on IC coincides with the usual inner product on C.
In fact, from 27 we obtain the classical norm on IC defined by

Now let us show that the space IC is Hilbert space, i.e., IC is complete with the norm defined by (28)
Lemma 3.1The inequality

ProofLet us consider the set of pairs (a1(ε),a2(ε) ) providing

and the set of this pairs’s norms  Then we can write
Then we can write

Now let us take into account the set of pairs  providing the relations
providing the relations

In general, let  be a set providing the properties
be a set providing the properties

We obtain

So, we say that
Also, it is obvious that
taking into account (31) and (32).
By (33) and (34), we say that the set  providing properties in (31) and (32) is same.And also,
since
providing properties in (31) and (32) is same.And also,
since

we have

and

This take also into account, we can say
Theorem 3.3IC is a complete quasilinear space, hence, IC is a Hilbert quasilinear space.
Proof.Let x(n) be a Cauchy sequence in IC, where  Then, taking into account Lemma 3.1 and
Proposition 2.1-ii, for every ε>0 there exists an n0
∈N such that
Then, taking into account Lemma 3.1 and
Proposition 2.1-ii, for every ε>0 there exists an n0
∈N such that
Using these limits, we define
From Lemma 3.1 and Proposition 2.1-(ii), we have
Hence

This shows that x is the limit of (x(n)) and proves completeness of IC because (x(n) ) was an arbitrary Cauchy sequence.
Sometimes, frequency and time components of a signal are not precisely known. But, we can precisely determine their upper and lower bounds. Further their samples are also not known and however we can restrict its frequency and time to two interval components. Any model including such states can be represented by an interval signals. These or similar situations occurs also in EEG signal processing [12,13]. Processing of this kind circumstances need more extended mathematical analysis than classical analysis and algebra. Consider a discrete-time signal from an EEG detector [6], for more information about the signal processing and assume we know that the signal is a sinusoidal function sampled at 4 samples per period, for n∈N

That is the output is the discrete-time interval signal:

where i = −1 ,complex unit. This produces a bounded uncertainty in the output. The time component of the signal is classical but the frequency component includes a bounded uncertainty. Because, for example, the frequency of the signal at time 2 may be zero or π or any value at the interval [-1,sinπ]. Processing of this kind signals produces many difficulties since they have no mature mathematical foundations in contrast to the classical signal processing. Suppose that this output is an impulse response of a system. In other words, let us assume it is a filter and let us try to determine which system produce this output:
This kind system is a mapping T from a discrete-time signals to the discrete-time interval-valued periodic signals since an impulse is a classical unit signal. A discrete-time signal f is a two-sided sequence (..., f-1, f0, f1,...) and its output under the mapping T is in the from Tf=z. The impulse is the Kronecker delta sequence δ such that
Hence we should solve the equation Tδ=x in order to determine the system. Now we asserts that T is in a complex-interval infinite matrix form: Indeed, if
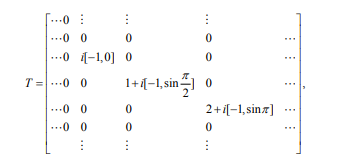
the matrix multiplication with impulse gives

We call this kind systems as a quasilinear systems and many interval matrix systems represents mentioned uncertainties. Their investigation needs a lot of new concepts and technics.
We call this kind systems as a quasilinear systems and many interval matrix systems represents mentioned uncertainties. Their investigation needs a lot of new concepts and technics.
We would like to express our deepest gratitude to the publishers of Journal of Biostatistics and Biometric Applications, Annex Publishers, Manassas, Virginia, USA for providing full publication support for this work.

![]()
 |
 |
 |
 |